








产品介绍
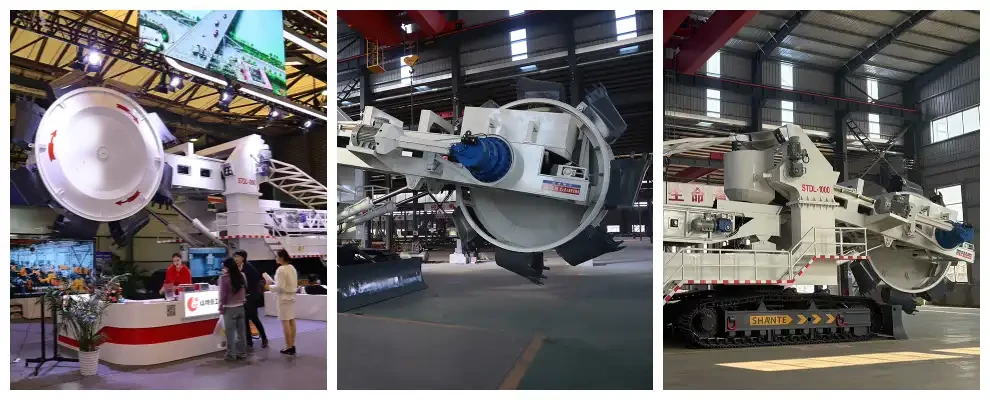
港口经济型斗轮堆取料机:
斗轮挖掘机静止不动时进行物料提取,利用其前置刀具组件和动臂铰接装置的同步旋转来剪切和收集基质。在旋转过程中,铲斗上升,捕获的物料在重力作用下卸到进料输送机上,随后通过料斗输送到卸料输送管线进行卸载。分层挖掘后,该设备前进或调节动臂高度以挖掘后续地层。挖掘深度与线性位移或动臂伸展范围相对应,而作业宽度则由旋转速度控制。移动功能提供支持,优先通过旋转组件和输送机介导的物料转移进行不间断的切割。

结构组成:
该设备集成了六个主要子系统:移动基座、旋转驱动装置、挖掘装置、物料输送网络、电力推进框架和液压管理系统。关键设计方面包括:
移动基座
现代配置主要采用履带式行走系统,部分型号采用铰接式行走机构。中型设备通常采用双履带设计,而重型设备则采用多履带布置,以优化地面压力分散。
全向旋转驱动系统:
该组件结合了旋转上部结构和方位推进组件,内含发电系统、传动基础设施、控制接口和操作员工作区。精密设计的回转轴承确保绕垂直轴的旋转能力不受限制。
挖掘单位
包含径向铲斗阵列、铰接式动臂、高度控制机构和传动系统。切削组件(圆形挖掘容器阵列)位于动臂末端。动臂通过门式铰链枢转,并通过张紧系统或液压执行器进行角度校准,以保持最佳切削几何形状。配置包括刚性动臂和伸缩动臂两种类型,并配有横向安装的驱动模块(带安全扭矩调节和齿轮传动的电机),以实现高效的动力传输。
物料路由网络
通过顺序排列的进料和出料输送机以及中间缓冲料斗进行操作。桥式配置单元将辅助转运输送机集成到桥式上部结构中,以增强物料流的适应性。
电力推进框架
采用电网同步变频调节,实现精确的电机转速和扭矩优化。
液压管理系统
主要通过流体动力执行器控制吊臂升降和传送带对准,确保挖掘循环期间的动态操作精度。
港口用 高性价比斗轮堆取料机 | |||
项目 | 单元 | 技术规格 | |
外形尺寸 - 长×宽×高 | 毫米 | 21090×4000×5888 | |
轨道尺寸 | 毫米 | 5700×600 | |
履带板宽度 | 毫米 | 600 | |
履带驱动液压马达 | / | 液压马达+减速机 | |
Teack驱动液压泵 | / | 丹佛斯 | |
液压泵驱动马达 | 千瓦 | 45 | |
斗轮臂长 | 毫米 | 8280 | |
卸料臂长度 | 毫米 | 8000+3000 | |
额定输出 | 立方米/小时 | 900 | |
斗轮直径 | 毫米 | 3600 | |
斗轮转速 | 转/分 | 0-8 | |
每个斗轮的容积 | 立方米 | 0.3 | |
bucket数量 | 片 | 8 | |
斗轮节距角 | ° | 25~-5 | |
材料密度 | 吨/立方米 | 0.8~1.8 | |
斗轮转弯半径 | 毫米 | 10036 | |
取料输送带宽度 | 毫米 | 1200 | |
斗轮旋转角度 | ° | ±180 | |
卸料输送带宽度 | 毫米 | 1000 | |
卸料输送带长度 | 毫米 | 29524 | |
卸料输送带旋转角度 | ° | ±65 | |
卸料输送带节距角 | ° | 0-16 | |
卸料输送带最大堆积高度 | 毫米 | 6500 | |
伸缩机构驱动形式 | / | 液压缸 | |
斗轮过载保护方式 | / | 自动的 | |
配套电机功率 | 履带行走驱动 | 千瓦 | 45 |
| 斗轮摆动驱动 | 千瓦 | 75 | |
| 斗轮输送带传动 | 千瓦 | 15*2 | |
| 出料传送带驱动 | 千瓦 | 15*2 | |
| 发动机功率 | 履带行走驱动 | 千瓦 | 105 |